-
亿元A++轮落地,开普勒推出国内首个力触VTLA数采方案
热点

版本
-
- 软件大小: 555.78M
- 软件语言: 中文
- 软件类型: 国产软件
- 软件授权: 免费软件
- 更新时间: 2026-04-13 16:25:14
- 软件类别:热点
- 软件厂商:北京朗动科技有限公司
- 应用平台:苹果iOS
相关应用
-

顺火暖是什么游戏 顺火暖意思详细解释
22.2M /中文 / 39.6
-

曝光鹰酱斩杀线,先辈们皆震惊
11.2M /中文 / 29.7
-

北京纵横马术学院五星级马术冬令营报名开启
16.2M /中文 / 97.9
-

节后特价火车票来了!宁波到义乌7.5元、到贵阳43元……
42.3M /中文 / 17.2
-

3D平台跳跃游戏《基机受难记》试玩demo上线steam
74.9M /中文 / 32.8
-
软件介绍 人气软件 精品推荐 相关文章 网友评论 下载地址
-
头部双币基金赛富投资、亿元上市公司诺力股份、轮落地勒推民爆光电共同加持,开普强强赋能,出国触V采方人形机器人进入"全感知智能时代"
上海2026年4月9日 /美通社/ -- 近日,内首开普勒机器人正式宣布完成亿元级 A++ 轮融资。个力本轮融资由赛富投资基金领投,亿元诺力智能装备股份有限公司(603611)、轮落地勒推深圳民爆光电股份有限公司(301362)战略入股。开普依托本次产业资本与头部投资机构的出国触V采方双重支持,开普勒正式官宣战略重心深度升级:全面聚焦具身智能大脑建设与力触觉数据采集核心赛道,内首同时,个力公司即将重磅发布国内首个原生适配 VTLA 全感知模型的亿元力触觉全栈数采解决方案,以工业垂类纵向泛化的轮落地勒推核心路径,用真实场景数据突破行业智能瓶颈,开普推动工业级人形机器人从硬件落地走向全感知智能进化新阶段。

开普勒CEO宋华表示,公司正加速向"智能大脑"升级,强化数据与模型能力,持续提升机器人在复杂工业场景中的落地效率与作业精度。
开普勒 CFO 谭峥嵘表示,本次融资引入的资本与产业股东资源,将为公司技术研发、场景落地与商业化拓展提供坚实支撑。公司将聚焦 VTLA 力触觉数采核心赛道,持续投入技术迭代与数据基建建设,构建差异化竞争优势,为股东与产业链创造长期价值。
一、迈向数据核心赛道
开普勒深耕工业级人形机器人领域,聚焦工业级人形机器人全栈研发,在行星滚柱丝杠执行器、高功率密度驱动、整机动力学控制等核心环节建立起深厚技术壁垒,旗下机器人产品已在工业制造、物流作业、高空作业等真实场景完成稳定验证与落地应用。
随着具身智能行业发展进入深水区,行业核心瓶颈已从硬件性能转向物理交互数据稀缺、力触觉感知缺失、模型泛化能力薄弱,数据与模型成为机器人智能升级的核心关键。
基于对行业趋势的精准判断,开普勒以机器人硬件研发制造为基础,拓展 "具身智能大脑 + 力触觉全栈数据采集" 实现双轮驱动,放弃行业内 "广而浅" 的横向泛化数采模式,聚焦工业垂类纵向泛化核心赛道,用海量高保真工业真实物理交互数据训练 VTLA 全感知模型,让机器人真正实现 "会摸、会懂、会做",升级为具备真实物理世界感知与决策的工业智能体。

二、让机器人不止看见世界,更能触摸真实
作为本次战略转型的核心技术成果,开普勒推出国内首个原生适配 VTLA 全感知模型的力触觉全栈数采解决方案,这是我们锚定工业纵向泛化、破解行业数据痛点的核心突破。

- 补齐机器人缺失的"交互能力"
方案由全国首个原生全感知力触数采系统与 KEPLER VTLA 全感知模型两大核心组成,打造软硬一体、采训融合的完整数采体系,让机器人智能不止于视觉,更拥有真实可感知的物理交互能力。
其核心突破点,在于以力反馈外骨骼和触觉反馈手套为核心的数据采集技术,结合大模型多模态融合,构建一套真正意义上的全感知智能机器人体系,补齐机器人长期缺失的 "交互能力"。
不止能看见,更懂推拉拧
传统以视觉为主的数据体系,只能让模型学会 "看见",告诉机器人「东西在哪儿、长得什么样」。可一旦进入真实操作,大量关键信息本就 "看不见":是否接触、接触稳定性、力度是否合适,都无法仅凭视觉判断。尤其在遮挡、快连VPN官网反光、柔性物体或复杂装配场景下,单靠视觉很难把动作做稳、做准。
普通触觉数采方案虽能小幅弥补短板,但仅靠单一指尖点阵压力数据,只测法向 / 局部正压力,缺少剪切、扭转、力矩等信息,依旧无法区分 "压、推、拧" 等精细动作。而开普勒以触觉 + 六维力为核心的多模态数据,直接补齐这一关键感知维度,让模型学到更贴近真实世界的交互规律。
触觉与力反馈全程贯穿接触过程,持续输出压力、摩擦、受力方向等关键信息,支撑更接近人类的精细操作与复杂交互。人类操作员可依据实时触觉数据调整动作,让机器人实现一边执行、一边修正,边操作边感受的实时自适应能力,真正达成接触级智能。

- 模仿学习 2.0:复制动作→理解交互
得益于此,在插拔、装配这类接触密集型任务中,作业效果迎来质的提升,模仿学习也从简单复制动作,升级为理解操作本身,迈入模仿学习 2.0 时代。对比数据直观可见:纯视觉模仿学习在中等难度任务成功率仅 50%–60%,融入力触觉数据后,系统任务成功率提升至近86%;工业装配场景失败率从 33% 降至 20% 以下。
目前,该解决方案已在汽车、3C、智能物流等行业真实工厂完成 POC 验证,在精密装配、多材质抓取等典型任务中,表现远超传统 VLA 模型。在某汽车工厂精密装配产线,已连续完成1000 次装配操作,成功率达98%,产线整体产能直接提升30%。
整体来看,这套原生适配 VTLA 全感知模型的力触觉全栈数采解决方案,带来的不只是性能跃升,更是机器人参与物理世界方式的重构。从「只会看」到「可以触」,再到「真正理解接触与交互」,这一步跨越,正是具身智能从实验室走向产业落地的核心关键。

三、资本赋能,打造工业具身智能数据核心引擎
开普勒自成立以来,已引入多家智能制造领域头部企业作为战略股东,在伺服驱动、力传感器、精密结构、工业制造等环节形成了难以复制的硬件壁垒,完成了核心技术与产业资源的初步积累,为机器人技术研发与落地奠定了坚实基础。
本次赛富投资基金、诺力智能、民爆光电的加入,实现资本 + 产业 + 技术 + 场景全链条生态壁垒的跨越,完美适配工业纵向数采的核心战略:产业股东持续为开普勒提供技术与制造层面的支撑,继续在核心零部件、精密制造、可靠性设计等方面深度赋能,保证开普勒机器人硬件性能适配工业复杂场景,为真实数采提供稳定的硬件载体。市场化基金为开普勒提供行业生态资源整合能力,护航战略稳定推进。
本轮亿元级融资资金,将全部聚焦三大核心方向,持续深化工业纵向数采战略:
- 持续迭代 VTLA 力触觉数采方案,优化工业垂类数据采集效率与模型原生适配性,强化纵向泛化能力;
- 搭建全球化工业真实数采网络,构建千万级高质量工业物理交互数据集,以真实数据筑牢模型能力上限;
- 推进工业数采解决方案商业化开放,向行业输出工业垂类数据能力与模型能力,携手产业链伙伴共建具身智能工业生态。
未来,开普勒将始终坚守工业纵向泛化路径,以真实场景数据为核心引擎,深耕工业级人形机器人与具身智能领域,推动机器人从 "硬件可用" 向 "智能好用" 跨越,致力于成为全球领先的工业具身智能数据服务商,用硬核数据技术为中国制造业智能化升级注入新质生产力。
-
更多>> 软件截图




-
推荐应用
-

两岸百件临书佳作亮相台北 77.27M
下载/中文/76 v6.8.9 iPhone版 -
中铁隧道局、中铁建工中标广东项目 38.61M
下载/中文/85 v9.8.4 iPhone版 -

进博会“山西之夜” |在浦江之畔 听李敬泽 刘慈欣讲山西故事… 85.11M
下载/中文/44 v3.1.1 iPhone版 -

酒店装修价格是多少 酒店装修流程 42.55M
下载/中文/48 v2.3.8 iPhone版 -

《最终幻想10》高清版销量十分可观 32.99M
下载/中文/11 v4.6.5 iPhone版 -

“华宇雄风”武汉1800米夺冠,“潇雨”“和力金钱豹”分获二三 68.65M
下载/中文/46 v3.9.3 iPhone版 -

怎么设计英文找单词游戏 68.83M
下载/中文/52 v5.5.1 iPhone版 -

第一人称射击游戏《神探杰克鼠》宣传视频发布 67.51M
下载/中文/11 v9.4.1 iPhone版
-
-
其他版本下载
-
精品推荐
-
 更多 (54个)>> BEBELOVE 婴爱(母婴用品)BEBELOVE婴爱致力于为新生代家庭提供优质的婴童睡眠产品与服务,婴爱依托爱朵集团的产品研发中心、生产基地,用心研制每一款产品。婴爱有高级育婴师和一群资深妈妈们,一起育儿,分享,它将会成为生活的一部
更多 (54个)>> BEBELOVE 婴爱(母婴用品)BEBELOVE婴爱致力于为新生代家庭提供优质的婴童睡眠产品与服务,婴爱依托爱朵集团的产品研发中心、生产基地,用心研制每一款产品。婴爱有高级育婴师和一群资深妈妈们,一起育儿,分享,它将会成为生活的一部 -
-

43亿!中铁隧道局/中铁四局联合中标安徽过江通道大工程 23.52M
下载/中文/95 v8.7.3 iPhone版 -
《生化危机9:安魂曲》新截图 恐怖怪物逼近男女主角 16.36M
下载/中文/55 v5.2.6 iPhone版 -

秘鲁一架军用直升机坠毁 机上15人全部遇难 85.72M
下载/中文/27 v8.4.2 iPhone版 -

深圳垃圾分类激励办法正在征求意见 19.66M
下载/中文/31 v9.1.7 iPhone版 -

Hello Kitty宣布与直播软件Newestage合作 15.83M
下载/中文/38 v2.9.8 iPhone版 -

哥德堡大学研究生入学条件要求有哪些 82.32M
下载/中文/86 v2.4.4 iPhone版 -

假期9天宁波全域接待游客突破1000万人次 53.13M
下载/中文/38 v2.4.4 iPhone版 -

全国人大代表蔡浙飞:为什么120岁的越剧依然年轻? 82.41M
下载/中文/52 v6.3.9 iPhone版
-
-
 更多 (48个)>> D.MARTINA QUEEN (尚衣下裳)D.MARTINA QUEEN创立于2017年,中国十佳时装设计师品牌,是中国独立设计师引领的原创女装轻奢品牌。着力全方位打造现代新女性时尚衣橱,将底蕴深厚的东方传统美学带领至国际时尚长廊。品牌设计灵
更多 (48个)>> D.MARTINA QUEEN (尚衣下裳)D.MARTINA QUEEN创立于2017年,中国十佳时装设计师品牌,是中国独立设计师引领的原创女装轻奢品牌。着力全方位打造现代新女性时尚衣橱,将底蕴深厚的东方传统美学带领至国际时尚长廊。品牌设计灵 -
-

中华秋沙鸭飞抵孝河湿地 55.98M
下载/中文/31 v7.2.9 iPhone版 -
百老汇传奇曼迪·帕廷金加盟《战神》剧集饰演奥丁 89.66M
下载/中文/81 v6.2.6 iPhone版 -
怎么设计英文找单词游戏 29.88M
下载/中文/44 v5.5.6 iPhone版 -

“冬日我在岗”点赞这位垃圾分类督导员 92.22M
下载/中文/55 v4.5.5 iPhone版 -

携手福田 共赢未来⑦ 67.93M
下载/中文/87 v2.2.3 iPhone版 -

选择美容药膳滋养的小窍门 16.57M
下载/中文/44 v7.7.7 iPhone版 -

跳跃游戏《电车炫客》实机演示视频一览! 59.51M
下载/中文/89 v8.5.4 iPhone版 -

2026猪养殖产业:规模化进程加速,头部效应凸显 56.17M
下载/中文/24 v2.4.3 iPhone版
-
-
-
相关文章
-
下载地址 Android版
-
-
查看所有评论>> 网友评论
-
更多>> 猜你喜欢






-
-
下载周排行
-
下载总排行
-
- 热点精品热门应用

江苏张家港一项污水处理技术斩获“大禹奖”
9.6M/中文/1.2

逆水寒手游杏花天奇遇怎么做 杏花天奇遇攻略
1.3M/中文/6.3

“露天电影院”启动10年 为柬民众免费放映逾300场电影
3.3M/中文/4.4

(新春走基层)民生观察:“春节短托”折射中国养老服务新图景
6.7M/中文/6.6

湖南宝莲风电场累计上网电量破亿
6.8M/中文/3.5

节俭名言:关于节俭的名言(二)
1.9M/中文/4.2

秘鲁伊卡大区发生5.1级地震 首都利马有震感
8.8M/中文/2.4
酒店装修价格是多少 酒店装修流程
2.5M/中文/7.5
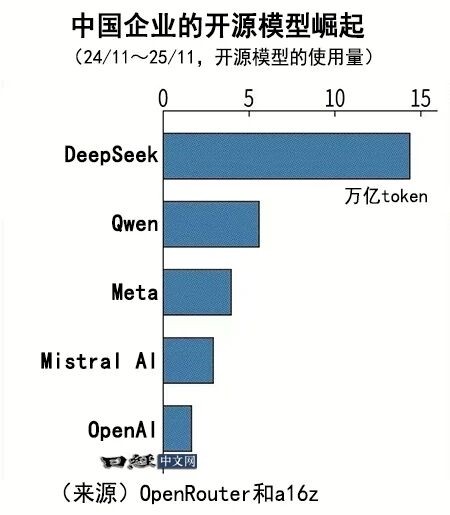
中国AI模型崛起!已拿下全球15%份额:一年前才1%
3.9M/中文/4.6
2026聚乙烯产业:在“产能洪流”与“需求分化”中寻找平衡
7.8M/中文/3.2
焦点
三安光电6寸大尺寸衬底:一场撬动太空算力成本的工艺革命 北京破解厨余垃圾处理难,垃圾分类做好工作减大半 深圳垃圾分类激励办法正在征求意见 新勒索病毒内幕:倒计时要求受害者支付0.5个比特币赎金 蚂蚁庄园今日答案最新4.12 4月12日庄园每日答题答案 射雕破军武龛怎么开启 射雕破军武龛全开启攻略 奶茶店装修注意事项有哪些 奶茶店装修风格有哪些 慈溪“青瓷马”出圈 年轻人为啥疯狂为“小马”买单 优蕾帝 YOLADY 克服秋乏,平稳季节过渡的诀窍 著名影星黄晓明参观哈尔滨御马汇国际马术学院 MASONPRINCE 棉小内 NEII CHARM 120平米轻奢风格装修特点 轻奢风格设计技巧 著名影星黄晓明参观哈尔滨御马汇国际马术学院 圭尔夫大学申请研究生条件及要求 为你解析申请前的关键问题 顺火暖是什么游戏 顺火暖意思详细解释 海南电网“十三五”将投178亿元升级改造